: .
西北农林科技大学
机械系统动力学
结课报告
姓名:何淼班级:机制113班学号:20110: .
西北农林科技大学
机械系统动力学
结课报告
姓名是何淼,班级属于机制113班,学号是2011012760,时间点在日期上标注。
六杆机构的动力学分析
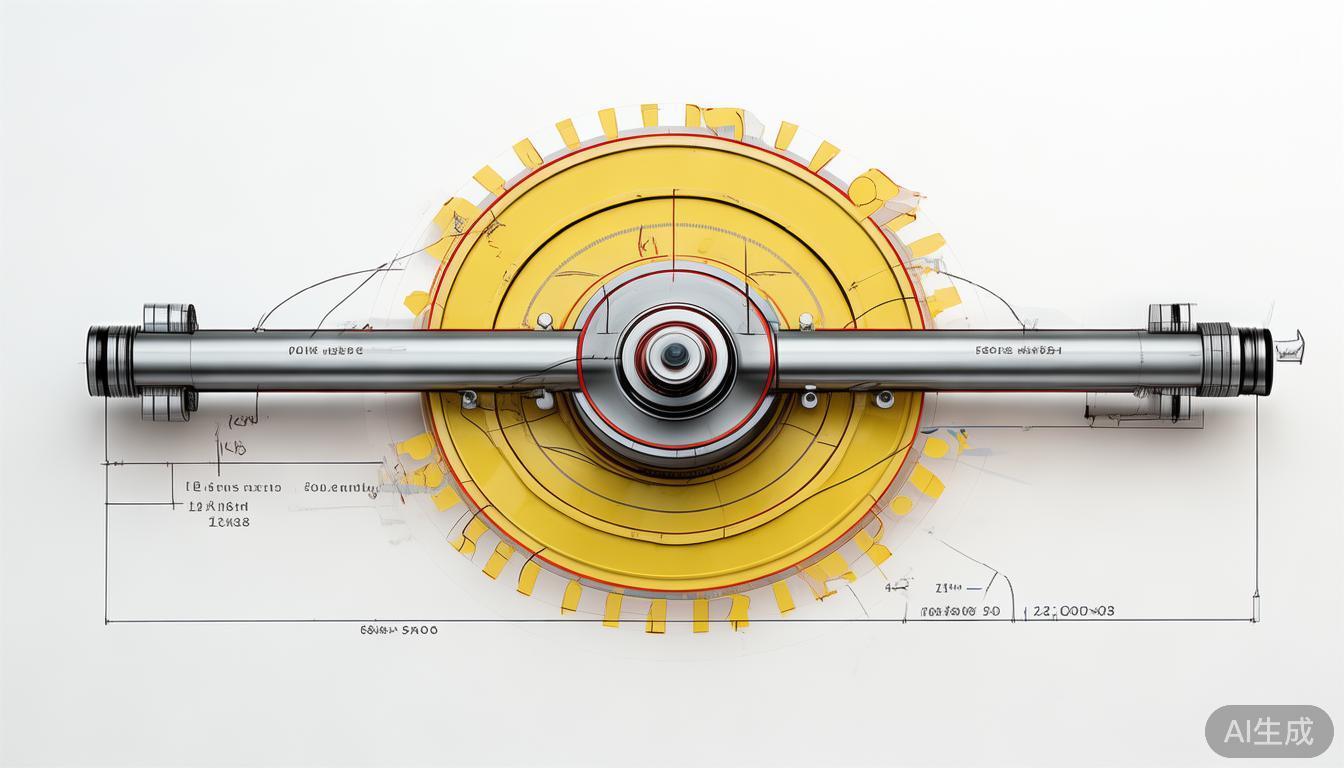
此为六杆机构示意图,其中OA杆作为主动件,由电机驱动,动力经齿轮组传递。图中齿轮传动系一对标准配置的标准渐开线直齿圆柱齿轮,正压力N与两节圆公切线夹角为分度圆压力角20度。另需考虑垂直于N的齿面滑动摩擦力F,将其视为恒力,指向齿轮O侧,由此可确定啮合力的具体方向。对六杆机构进行动力学分析,在受力分析后列动力学方程。
采用逐步方程组解法时,在两个铰链点连线方向上,沿切向与法向布置若干铰链点力,而在其他方向则沿x轴和y轴进行布置,受力分析图示如下:
以滑块D为研究对象,列动力学方程:
以BAD杆为分析对象,建立运动学方程式:该杆件动态平衡条件为Fd-DxP一nxD等于零,同时Dy59也需满足零值约束
DxFasin:3一Nbsin:3-Fbcos:3-典乂3等于零DyFasin:3-Nacos3Nbcos3-Fbsin:3减去m乘以g减去m乘以3y的平方等于零MB等于Cy乘以xc减去XB减去Cx乘以yc减去yB减去NALBA减去J3B3减去m乘以g乘以X3减去Xb等于零以滑块A为分析对象,建立运动学方程
Ax与FA的余弦值乘以3减去NA的正弦值乘以3等于m2xA,Ay与FA的正弦值乘以3NA的余弦值乘以3减去m2g减去m2yA等于0,Ma等于B乘以2减去J2A乘以A减去m2g乘以X2减去XA减去m2
yA(X2-XA)-XA(y2-yA)
=0Fa=%Na以