自动化机械手应用日益广泛,人工操作岗位逐渐被取代,国内工业自动化发展是大势所趋,使用自动化机械手时,需要掌握基本维护知识,以预防故障发生,进而降低维修开支。依据冲压作业流程差异,机械手型号规格各有不同,通常有:单台设备单工位机械手、单台设备多工位机械手、多台设备联动机械手。
主要调试项目有:
更换模具时,必须调整臂与臂之间的间隔,具体操作如下,首先把材料放到升降装置上,接着使左侧机械臂的吸盘中心与材料中心对齐,同时让右侧机械臂的吸盘中心与模具中心对准,然后手动调整机械臂的z轴高度,以此改变相应传感器的位置
运行过程采用手动分步执行,首先确认移动距离、吸附装置摆放点、垂直方向高度参数的准确性,接着调整行进节奏,以稳定运行为目标,通常一个周期耗时四到八秒
调整模具间隔时,务必保证所有模具间隔一致,各个模具的平面高度也必须相等。我们建议:在实施冲压作业时,应选用规格统一的外形模架,在冲压设备上精确设置模具定位装置,以便于后续模具的替换。
下降电磁阀得电后,机械手开始下移,下降电磁阀失电后,机械手下移动作终止,上升电磁阀随后得电。
机械臂开始抬升,抬升电磁装置失去电力供应,机械臂抬升动作终止。与此类似,向左移动和向右移动功能分别由对应的移动电磁装置负责。机械臂的松开与夹紧功能则由一个单一线圈(称作夹持电磁装置)来实现。
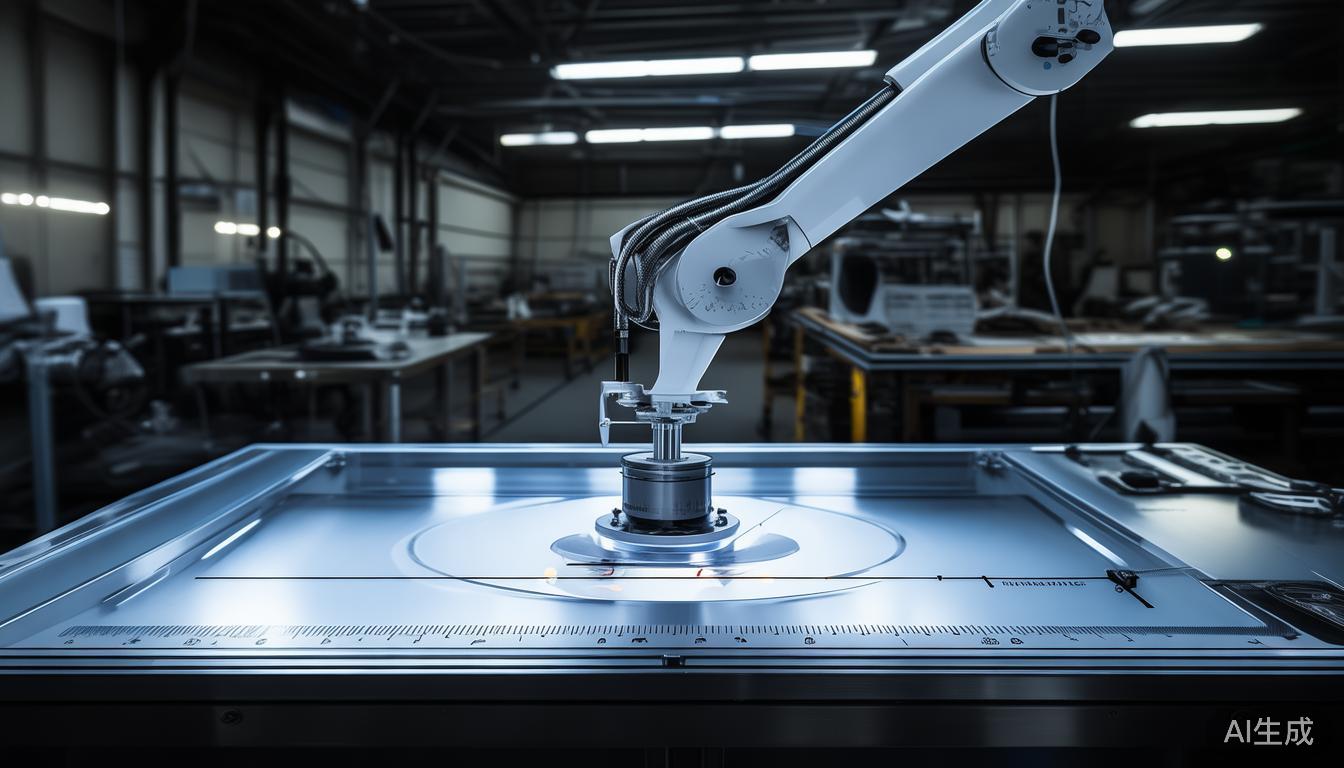
这个自动装置通过模拟人类手臂的某些动作,依据预设的plc程序、运行路径及功能指标,能够自动完成抓取、运输或执行任务。这种设备在制造业领域投入使用时,被称为“工业机械手”。机器人并非单纯替代人类工作,而是融合了人类优势与机械特性的人性化电子机械装置,既借助人对环境变化的迅速应对和判断来增强机械手功能,又具备机器长时间稳定运行、高精度操作及耐受恶劣环境的特点,在某种程度上可视为机器发展的结果,是工业与非工业领域关键的生产和服务工具,也是先进制造技术不可或缺的自动化装置。