带领你探索机器人制作奥秘的DIY SMARS Robot机器人制作教程来啦!本教程会引导你逐步制作出功能全面的机器人,它的特色是配备了OLED显示屏,还有炫彩RGB LED灯,以及能播放美妙旋律的蜂鸣器。在制作进程之中,你会学习到怎样去设计电路,还要精心组装PCB,并且利用3D打印技术打印出机械部件。凭借精细的运动控制,以及便捷的蓝牙连接,还有可自由定制的眼部表情,这款机器人将会展现出令人惊叹的活力与智能哦!接下来,就让我们一起开启这场机器人制作的奇妙旅程吧!
电子元件:
PCB与焊接:
机械部件:
显示屏与传感器:
工具与软件:
其他组件:
随后,一块儿来探寻电路原理图以及PCB设计的奇妙之处,给打造出功能完备的机器人筑牢稳固根基。
电路原理图设计
有了Altium Designer软件的助力,我们最先开始进行电路原理图的设计,设计的重点是围绕着采用SMD VQFN封装的Atmega328p微控制器实施,它那紧凑的尺寸成了我们的优先选择,原理图里会涵盖以下关键的组件:
有着SMD版本的L293电机驱动器,此组件承担着驱动操作,要驱动的是两个直流电机 。
CH340集成电路,此集成电路把USB数据转变为TTL信号,借由这样的转变,进而让我们得以借助Arduino集成开发环境对电路展开直接编程。
有着共计十二个数量的 WS2812 RGB LED 灯,这些 LED 灯专门会被用于去产生那种丰富多彩的光线效果 。
有源蜂鸣器,该组件同微控制器的3号引脚相连接,其作用是用以输出动听的旋律 。
SIL插针:为超声波传感器和OLED显示屏提供连接接口。
此外,原理图当中,会含有电阻器这种组件。还会有电容器作为其中一部分。二极管也是其包含的组件。晶体管同样在原理图里。16MHz晶体振荡器也被包含。还有必要的连接器等组件也在原理图中被囊括 。
PCB设计与制造
完成原理图设计之后,我们紧接着展开PCB布局设计,目标在于确保PCB尺寸跟Arduino UNO板相兼容,进而能够与机器人底盘完美结合,在布局之时,我们要考虑各组件的位置,以此确保顺畅的电流流动以及信号传输,比如说,USB连接器和CH340 IC会被放置在PCB的右侧,而OLED和超声波传感器的连接器处于左侧,微控制器Atmega328p将被放置在中央位置,其周围环绕着12个RGB LED灯。同时,我们还需要确保L293电机驱动器拥有充足的散热区域。
做完布局之后,我们会去生成GERBER文件,并且经由JLCPCB等制造商去订购PCB。挑选黑色阻焊层能够给予电路板时髦且专业的样子。另外,订购一个PCB模板也是有必要的,它会在后续的焊锡膏涂覆进程里起到辅助功效。
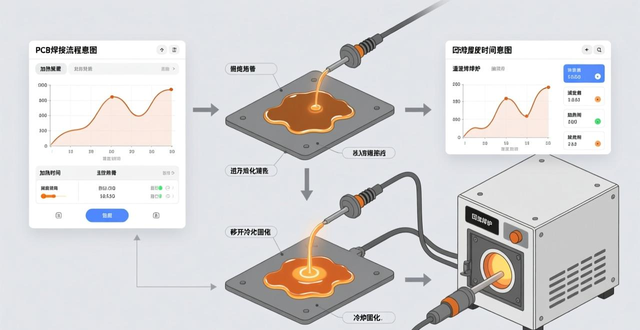
焊锡膏涂覆与组件焊接
处在把全部组件焊接于PCB之上的进程期间,我们要运用焊锡膏、加热板或者回流焊炉等工具,且严谨依照焊接规范去开展操作。此一步骤会关联到焊锡膏的均匀涂抹、组件的精准放置以及最终的焊接质量查验等多个环节。虽说在此处我们没办法详尽展开每个步骤的具体细节,然而借助遵循适宜的工艺流程以及注意事项,我们能够保证焊接工作的顺利开展。
我们利用PCB模板,十分仔细地去把焊锡膏涂覆至PCB的焊盘那里。于涂覆这个过程当中,得要保证焊锡膏能够均匀地覆盖住焊盘,以此给后续的组件焊接提供优良的基础。紧接着,我们依照原理图布局,小心翼翼地把微控制器、电机驱动器、LED灯、蜂鸣器等组件逐个放置到PCB之上。在放置期间,我们需要留意组件的方向以及位置,从而确保它们能够正确地与焊盘相连接。
紧接着,我们把PCB放置于加热板或者回流焊炉内部,按照制造商所推荐的参数予以加热。在加热的进程当中,焊锡膏会慢慢熔化,并且跟组件的引脚构建起牢固的连接。加热结束之后,我们会针对每个焊点开展细致检查,保证焊接质量契合要求,不存在短路或者虚焊的状况。要是有必要,我们还能够运用显微镜去辅助检查微小的焊点细节。
涂覆焊锡膏的时候中,咱们不得不谨慎把控使用量,避免过量致使焊接之际短路或者焊点模糊。与此同时,得认真核查模板跟PCB的对齐状况,保证焊锡膏精确地涂覆于正确的焊盘之上。涂覆完毕之后,能够轻轻地移开模板,并且仔细审查焊盘上焊锡膏的分布,竭力达成均匀且无遗漏 。
往后,我们着手把SMD组件逐个安放在PCB上,这一环节得借助镊子,把每个组件精心摆在于其对应的焊盘之上,并且依照设计图纸来精准定位,于放置进程里,尤其要留意LED和IC等组件的方向性,从而防止出现放置方面的差错。
于放置SMD组件之际,我们务必要保证每个组件都精确地对齐,且稳固地安置于相应的焊盘之上。尤其是针对IC等关键组件而言,其引脚与焊盘的对齐精度极为关键,缘由在于这会直接对电气连接的可靠性产生影响。对于尺寸较小的组件,比如说0402或0603的电阻和电容,或许需要借助放大镜或者显微镜来辅助我们开展精准的放置操作。
组件放置期间,我们得格外谨慎,防止碰到已涂覆焊锡膏的焊盘,怕污染焊锡膏或者致使组件位置偏移。要是小心将组件放错,我们能用镊子微调,但是一定要留意操作轻柔,免得在焊盘上留划痕或者破坏焊锡膏的完整性。
在所有组件均已被正确放置完毕之后,我们必须再次逐个去核查每一个组件的位置以及方向,目的在于确保它们跟设计要求绝对相符,进而为紧接着的焊接工序做好充足准备。
组件精准放置完成后,我们要借助加热板或者回流焊炉把它们和PCB焊接到一块。要是选加热板,要把PCB轻轻缓缓地放到预热好的板面上,还要紧密监视焊接的整个过程。焊锡膏熔化的时候,它会和PCB形成牢固的焊点。要是用回流焊炉,就得严格依照焊锡膏给出的回流曲线来操作。
在整个焊接的流程里,要保证PCB能均匀受热,来避免局部过热或者是加热不足。加热板以及回流焊炉的温度,还有时间参数,都得按照焊锡膏的特性以及PCB的材质去设定。当焊锡膏完全熔化并且凝结成焊点之后,就可以小心地移开PCB,让它自行冷却。在冷却的过程当中,焊点会渐渐固化,进而保证连接的稳固性能 。
焊接完成之后,我们要针对各个焊点开展细致入微的检查,要保证它们展现出清晰且光滑的形态,不让短路的状况出现。要是察觉到不良焊点,就要借助烙铁去做修复工作。而且,还得检查组件有没有出现松动或者损坏,从而能够及时做处理 。
而后,我们会运用清洗剂或者酒精,去清理 PCB 上面多余的焊锡膏跟助焊剂残留物,籍此维持电路板的洁净以及可靠,。
处于显微镜之下时,我们会对焊点状况做进一步核查。需要保证它们形成得良好,不存在焊桥或者冷焊点方面的问题。与此同时,凭借助焊剂清洗剂溶剂,我们可将电路板上的任何助焊剂残留予以清除,从而让电路板展现出干净又专业的外观。
紧接着,我们会着手去对OLED显示屏进行焊接,还要焊接超声波传感器,以及电机输出的通孔连接器。此外,还得把HC-05蓝牙模块给焊接到PCB上,同时也要将9V电池连接器焊接到PCB上,并且要保证所有的连接都是稳固的,而且是可靠的。在把焊接工作完成之后,我们会去检测每个组件的功能是不是正常。
当电路板焊接完成后,当电路板测试工作完成后,然后才着手开始组装机械部件,并着手开始组装OLED显示屏。这一般情况下会设计包含将OLED显示屏精准放置精确地安装到PCB的预定设定位置,并且要做好对此进行固定。与此同时,我们同样也需要完全确保其他机械部件(像是外壳、支架等等这个样子的部件)全都均已正确无误安装,并且要与电路板上的连接器以及组件相互匹配相适配。
装配期间,必须万分小心,防止弄坏电路板区域内部带有任何性质特点可堪称组件的东西或者焊点。借助螺丝刀、螺母、垫片等恰当范围内的工具以及材料,把机械部件稳稳当当固定到PCB上面。与此同时,认真仔细查看OLED显示屏,保证它的显示处于正常状态,没有损坏没有欠缺。
组装完成之后,针对电路板开展全面且细致的功能以及连接方面的检查,以此来验证所有的组件全都能够正常投入运作,并且不存在松动或者损坏的状况。像这样,就能够放心地把电路板跟其他部分,比如说机器人底盘,实施连接以及整合的操作。
往后是机械部件的装配,首先,从Thingiverse那儿寻得STL文件,接着借助3D打印机制作出机器人的机械部件。待到打印完毕,转而着手链条的组装。你能够挑选6毫米的黄铜丝或者75毫米的3D打印机耗材当作关节材料,经由线或者耗材穿过链环去塑造出富于变化的链条。要是有必要的话,可以用超强胶对关节予以固定。要留意,每条链条需要16个部件,所以两条链条总共需要32个部件。
组装链条之际,一定要保证每个关节稳固相连,并且要让链条能够自然而然地弯曲以及伸展。要是发觉关节松动或者链条不够灵活,那么可以适度调整关节的紧固程度,或者用其他材料巩固连接。
当链条组装好了之后,就能够把它安装到机器人较为对应的部位上去。这一般情况下意味着要把链条的其中一端连接到机器人的驱动机构那里(就像是电机这种),而它另一端则要和负载部分(好像轮子或者是其他执行器之类的)相接连,在进行安装这个过程的时候必须要一定确保链条能够以顺畅的状态去传递力量以及运动,并且不会和机器人其他的部件之间产生干涉。
进行链条安装做完后,能够接着去组装机器人别的机械部件,像外壳这种,还有支架,以及传感器支架这一类。在这个期间,要维持部件的精确度以及稳固性,以此来保证机器人的整体性能还有稳定性。
最终,要对整个机器人开展全面的功能测试,还要进行调试,以此来验证所有机械部件都能够正常工作,并且机器人能够顺利地移动,还能够执行预定任务。
紧接着,开展轮子的安装事宜。首先,把从动轮放置到相应位置,且施加适度的力量使它稳固下来。然后,把主动轮跟小型直流电机联结在一起。之后,把直流电机以及9V电池分别固定于各自的固定板部件之上,以此来保证供电稳定。最后,把链条逐个连接到每个从动轮以及与之对应的主动轮上,从而达成机器人的机械组装。接下来,会持续进行OLED显示屏外壳的组装工作。
然后,我们要开始着手做OLED显示屏的组装。首先,按照设计蓝图,借助3D打印技术去制作一个专门给OLED显示屏做的外壳。在这个外壳当中,我们用心地预先放置了2毫米的螺纹嵌件,为的是保证显示屏可以稳稳地安装。之后,把OLED显示屏巧妙地放进外壳里面,并且通过螺丝来进行紧固。要是需要进一步提高显示效果,建议在外壳上安装一个树脂盖,并且同样用螺丝把它固定好位置。到这里,OLED显示屏的组装工作就结束。在这之后,你能够把已做好准备具有条件的被称为机械部件的东西,以及OLED显示屏的外壳,同PCB进行整合,以此达成整个机器人的装配工作。
开发Android应用
为达成对SMARS机器人的远程操控目的,你要用心去雕琢一个专门的Android应用。凭借MIT App Inventor这个开发平台,你能够简便地创作出具备方向控制、LED颜色调节以及OLED屏幕情绪显示等多种功能的应用。你会在应用里设置蓝牙通信功能,致使每一次按钮的点击都能够经由串行字符传送给机器人。接下来,让我们大概了解一下开发流程:
创建一个新项目,并启动MIT App Inventor。
进行应用界面的设计工作,其中涵盖移动按钮,还有色彩轮,另外存在用来显示情绪状况的眼睛表情图像 。
集成蓝牙连接,以便能够发送串行数据至机器人。
对每一个按钮进行与之相对应动作的分配,比如说,发出特定串行字符借此去控制机器人的运动,实现LED颜色的改变以及进行情绪显示 。
机器人编程
为了回应应用送出来的串行指令,你得给机器人编写一段Arduino代码,这段东西会负责剖析来自应用的命令,并且依据这个去操控电机运动,调节改变LED颜色,以及在OLED屏幕上呈现展示相应的情绪,用Arduino IDE把这段代码上传到Atmega328p微控制器,要留意,在上传之前得断开放弃蓝牙RX线的联接,上传完毕完成之后再再度重新连接。
最终组装与测试
当前,你那具备特定功能的SMARS机器人已然准备妥当,能够着手开展针对Android应用的检测工作了。
拿来电路板,把它跟9V电池相连,找个妥善的方法在机器人底盘上固定好它。然后,拿出电机,把它连接到应当连接的连接器上,再拿出OLED显示屏,也连接到对应的连接器上。做完这些步骤之后,利用Arduino IDE,把先前已经编写好的代码上传到Atmega328p微控制器那里。上传的时候,一定要牢记操作指南,确实保证在编程期间把蓝牙RX线的连接断开。最后,借助在MIT App Inventor里精心打造的Android应用,去测试你的机器人,全方位验证其运动控制功能,验证其LED颜色变换功能,验证其情绪显示功能。
结论
祝贺你,你已然顺遂达成了DIY SMARS机器人的打造,此刻,你能够进一步探寻它的各项全新功能,持续施展创造力,尽兴畅享制作的趣味!







